

Forefront of technology: How we built a digital twin of the Technology Laboratory, our research facility for three-dimensional spatial information, and manage related data
2023-02-21
What is the Technology Laboratory, our research facility for three-dimensional spatial information?
The Technology Laboratory works closely with our various labs around the world to aggregate a wide range of information on advanced technologies, and has accumulated a wealth of insights into various industries and businesses, including manufacturing, telecommunications, infrastructure, and healthcare. Combining these insights with future casting and agenda setting, we provide comprehensive support for the business transformation of companies, the technological innovation of universities and research institutes, and the industrial policy of governments.
This support starts with presentations that make full use of various technologies, such as the latest 3D visual equipment, directional speakers, large LED displays and projection. By using various actuators, such as 3D printers, laser cutters, and robotic arms to drive communication that directly leads to the implementation of technology via our Social Implementation Sprint Service. The Social Implementation Sprint Service consists of the following steps:
- Create business ideas that contribute to solving social Issues
- Develop minimum viable products (MVPs)
- Conduct proofs of concept (PoC) using MVPs
- Formulate business plans
Furthermore, we are exploring the potential of the Technology Laboratory as a hub for driving new innovations through face-to-face meetings with clients, interactions through avatars, and transmission over the internet, through communication across real and virtual boundaries. Therefore, it was necessary to build a digital twin of our research facility in which we could easily update 3D data.
In this article, we provide a step-by-step comparison of the different types of 3D scanners and their respective measurement accuracy, describe the 3D data of the research facility we created, and how we manage 3D spatial information.
Comparison of 3D scanners used for data conversion in our research facility

In recent years, the development of 3D scanners using light detection and ranging (LiDAR) technology has taken off, and various approaches, from hardware design to the combination of many algorithms in software, have led to the spread of various products and services that pursue the affordability and mobility of hardware and performance of software. However, highly accurate 3D spatial measurement is expensive and requires specialised knowledge of how to use the equipment. Therefore, 3D spatial scanning using conventional ground-based 3D scanners is generally outsourced to outside contractors. Meanwhile, products and services that use recent technological developments to allow even those without specialised knowledge to perform simple and accurate 3D spatial scanning have begun to be released.
Depending on the characteristics of the equipment, human 3D scanners can now be classified into four main types—traditional ground-based scanners, wearable scanners, portable scanners and smartphone scanners, as shown in the table above. Wearable and portable scanners use simultaneous localisation and mapping (SLAM) technology to perform data synthesis and correction in real time, and micro electro mechanical systems (MEMS) has made LiDAR technology more compact, improving speed to make 3D spatial scanning technology portable. Smartphone-based scammers use the visual inertial odometry (VIO) technology implemented in current-generation smartphones to enable unparalleled ease of use at a reasonable price.
We have been working on 3D spatial scans of our research facility to verify four 3D scanners that fall into the above four categories as technical validation for the creation of 3D data for the research facility and the management of 3D spatial information. We evaluated the results of these scans from each of five perspectives: cost, mobility, accuracy, speed, and distance. When we work on 3D spatial measurements, we choose the most appropriate 3D spatial scan by comparing the applications of each in a table and considering them alongside the business ideas created by our Social Implementation Sprint Service.
Comparison of measurement accuracy in different areas of our research facility

One of the most important aspects of building data compilation is measurement accuracy. We summarised the measurement accuracy of each area of the 3D space within the research facility that was with each 3D scanner. The research facility consists of achromatic concrete and wood flooring with polygonal patterns present in some areas. The measurement result shows that the wood flooring with polygons provided scans that were the most accurate and appropriate for data conversion. The reason for the lower accuracy of measurements in the areas with black paint with polygons is because as the colour of the LiDAR object gets darker, its reflectance diminishes. This means that building interiors with highly irregular patterns and light colours are most suitable for acquiring a high frequency of highly accurate data.
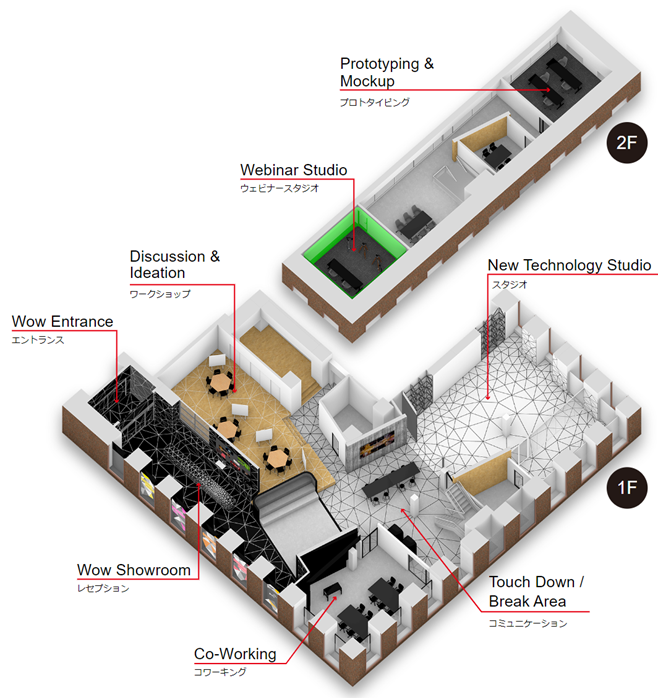
The 3D data we created of our research facility
Since the 3D data of this research facility was created based on the high-resolution data acquired by the above-mentioned 3D scanners, the dimensional discrepancy between the data and the actual research facility is minimal. In addition, because a stairway leading from the first floor to the second floor is located inside the research facility, this data can be used to verify various applications, such as visualising 3D spatial information and generating routes.
We have used light baking*1 to reduce the file size so that it can be used as a world for each of the current mainstream metaverse platforms without compromising the quality of the interior view. The above animated GIF is part of our metaverse verification, showing how users can manipulate a 3D avatar to go upstairs from the first floor to the second floor in the 3D data facility.
What is Spatial ID that uniquely manages 3D spatial information?
Finally, we would like to introduce the concept of a spatial ID, which is essential for managing multiple different 3D spatial information such as the interior of this facility, sensors, and 3D avatars. A spatial ID is a unique identity used to manage 3D spatial information. Many types of sensors are installed in this research facility, robotics and entrance passes, and in order to carry out various PoC, 3D spatial information such as location, temperature, humidity, and carbon dioxide levels is managed by using a common spatial ID. The orange voxel*2 in the above animated GIF represents a specific spatial ID range of approximately two metres square, the white fog represents gaseous information whose location is static, and the 3D avatar represents human position information whose location is dynamic Only 3D data belonging to the target spatial ID was retrieved and visualised on the game engine. However, moving objects around in a complex indoor environment requires even more precise location management.
The current spatial IDs can be managed in the following two ways:
- Increasing the zoom level value of the spatial ID to manage 3D spatial information by using voxels in units of tens of centimetres (left)
- Managing 3D spatial information by using voxels in units of several metres and coordinates in them according to a predetermined shape or format (right)
Basically, 1 facilitates the sharing of 3D spatial information with other platforms, while 2 can be adopted when high accuracy and update frequency of sharing position, orientation, and size are required.
We will continue to work with overseas members of our global network to unify the management method of 3D spatial information using the latest equipment and technology at our research facility. Please contact us if you are interested.
*1: works to reduce drawing calculations by writing light and shadow information into textures in advance.
*2 : A coined word from volume and pixel, and the smallest unit of the small cubes used in the 3D representation. The voxels used for spatial IDs can be rectangles of different heights.
Authors

S. Yanagisawa
Manager, PwC Consulting LLC
Fields and industries of focus:
AR (augmented reality), VR (virtual reality), XR (extended reality), 3D spatial information, metaverse
After working as an augmented reality (AR) app developer for a specialised AR and artificial intelligence (AI) solution development company and as an extended reality (XR) research engineer for a mega-venture company, Satoshi Yanagisawa joined PwC Consulting LLC. He is also a special lecturer at a fashion school. He has strengths in the field of XR, especially in AR, planning, research, PoC, and service development utilising smart glasses and VR devices and has most recently been involved in R&D related to 3D spatial information and the metaverse.

T. Sasaki
Director, PwC Consulting LLC
Fields and industries of focus:
3D spatial information, drone, mobility, metaverse, digital technology business strategy and concept development
Tomohiro Sasaki worked for a major general trading company-affiliated IT solution service provider, a foreign consulting firm and a major accounting audit firm before assuming his current position. He provided growth strategy planning and execution support and IT strategy planning and execution support to major companies in a variety of industries, including information and telecommunications, high-tech, and media and entertainment. Since joining PwC, he has provided planning and consulting services for analytics-related services. His areas of focus include 3D spatial information, drones, flying cars, metaverse, and other digital technology utilisation strategies, smart cities, OMO (online meets offline), transformation of work styles in the digital age, RPA planning and implementation promotion, etc. He is also a speaker at digital-related seminars, including external seminars.
T. Nagashima
Director, PwC Consulting LLC
Fields and industries of focus:
Emerging technology
After working for a major system integration company, Takayuki Nagashima joined PwC Consulting in 2012.Engaged in consulting work in the IT/digital domain for more than a decade, including IT/digital strategy development, data strategy development, governance development, roadmap development, system development, PgMO/PMO in large-scale system construction, PMI, BCP and business reform. He has a wide range of expertise.In recent years, he has mainly provided consulting services for the planning and full-scale development of new businesses utilising advanced technologies such as Metaverse, XR, IoT/digital twin and blockchain.